
15 peer-reviewed publications in proceedings (3 currently under review process), 3 peer-reviewed journal publications (2 currently under review process), cited 99 times, h-index 6. For a complete list of my publications, you can refer to the full list on Google Scholar.
- T. Batik, H. Brument, K. Vasylevska, and H. Kaufmann. “Shiftly: A Novel Origami Shape-Shifting Haptic Device for Virtual Reality,” IEEE Transactions on Visualization and Computer Graphics, vol. 31, no. 5, pp. 2331-2341, May 2025. DOI
- T. Lautenbach, O. Perl, H. Brument, and H. Kaufmann. “GeoCROW: Immersive Geospatial Data Visualization and Interaction in Virtual Reality,” 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Saint Malo, France, 2025, pp. 414-420. DOI
- H. Brument. “Preliminary Modelisation of User Locomotion Technique Usage during Navigation with Walking, Steering and Teleportation,” 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Saint Malo, France, 2025, pp. 270-274. DOI
- Brument, H., De Pace, F., & Podkosova, I. 2025. Does mixed reality influence joint action? Impact of the mixed reality setup on users’ behavior and spatial interaction. Journal on Multimodal User Interfaces, 19, 119–138. DOI
- Brument, Hugo, Arthur Chaminade, and Ferran Argelaguet. “Influence of Rotation Gains on Unintended Positional Drift during Virtual Steering Navigation in Virtual Reality.” Proceedings of the 30th ACM Symposium on Virtual Reality Software and Technology. 2024. DOI
- Brument, H., Lautenbach, T., & Podkosova, I. (2024, March). Spatial Awareness and User Preferences During Group Locomotion in Virtual Reality: A Study with Four-User Groups. In 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW) (pp. 403-409). IEEE. DOI
- Vasylevska, K., Ghazanfari, M., Sharifmoghaddam, K., Mortezapoor, S., Vonach, E., Brument, H., … & Kaufmann, H. (2024, March). Stiffness Simulation with Haptic Feedback Using Robotic Gripper and Paper Origami as End-Effector. In 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW) (pp. 48-53). IEEE. DOI
- I. Podkosova and H. Brument. “Towards Full Body Co-Embodiment of Human and Non-Human Avatars in Virtual Reality,” 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Orlando, FL, USA, 2024, pp. 432-435. DOI
- Brument, H., Zhang, R., & Kaufmann, H. (2024). Influence of Virtual Reality Setup on Locomotion Technique Usage during Navigation with Walking, Steering and Teleportation. In S. Hasegawa, N. Sakata, & V. Sundstedt (Eds.), Virtual Environments 2024: ICAT – EGVE – 34th International Conference on Artificial Reality and Telexistence. 29th Eurographics Symposium on Virtual Environments. Eurographics Association. DOI
- Iana Podkosova, Francesco De Pace, and Hugo Brument. 2023. Joint Action in Collaborative Mixed Reality: Effects of Immersion Type and Physical Location. In The 2023 ACM Symposium on Spatial User Interaction (SUI ’23). DOI
- Vasylevska, K., Batik, T., Brument, H., Sharifmoghaddam, K., Nawratil, G., Vonach, E., … & Kaufmann, H. (2023). Action-Origami Inspired Haptic Devices for Virtual Reality. In ACM SIGGRAPH 2023 Emerging Technologies (pp. 1-2). DOI. Best Emerging Technology Demo Award
Studying the Influence of Translational and Rotational Motion on the Perception of Rotation Gains in Virtual Environments
Brument, H., Marchal, M., Olivier, A. H., & Argelaguet Sanz, F. (2021, November). Studying the Influence of Translational and Rotational Motion on the Perception of Rotation Gains in Virtual Environments. In Symposium on Spatial User Interaction (pp. 1-12).

Rotation gains in Virtual Reality (VR) enable the exploration of wider Virtual Environments (VEs) compared to the workspace users have in VR setups. The perception of these gains has been consequently explored through multiple experimental conditions in order to improve redirected navigation techniques. While most of the studies consider rotations, in which participants can rotate at the pace they desire but without translational motion, we have no information about the potential impact of the translational and rotational motions on the perception of rotation gains. In this work, we estimated the influence of these motions and compared the perceptual thresholds of rotations gains through a user study ($n=14$), in which participants had to perform virtual rotation tasks at a constant rotation speed. Participants had to determine whether their virtual rotation speed was faster or slower than their real one. We varied the translational optical flow (static or forward motion), the rotational speed (20, 30, or 40 deg/s), and the rotational gain (from 0.5 to 1.5). The main results are that the rotation gains are less perceivable at lower rotation speeds and that translational motion makes detection more difficult at lower rotation speeds. Furthermore, the work provides insights into the user’s gaze and body motions behaviour when exposed to rotation gains. These results contribute to the understanding of the perception of rotation gains in VEs and they are discussed to improve the implementation of rotation gains in redirection techniques.
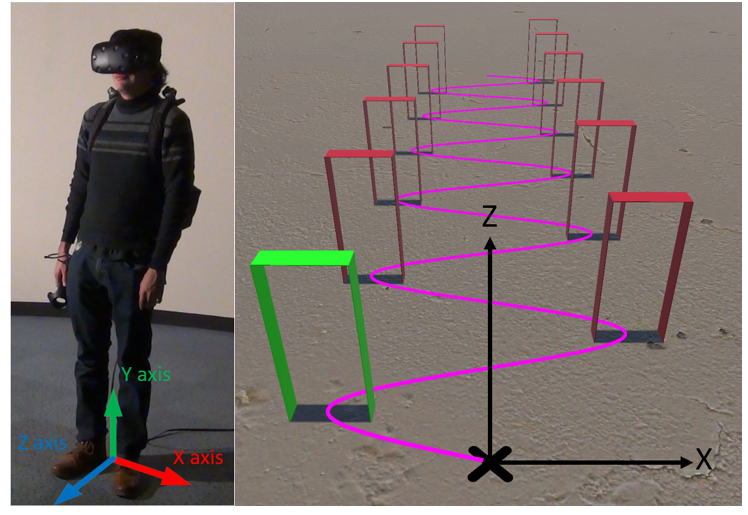
Understanding, Modeling and Simulating Unintended Positional Drift during Repetitive Steering Navigation Tasks in Virtual Reality
Brument, H., Bruder, G., Marchal, M., Olivier, A. H., Argelaguet, F. (2021). Understanding, Modeling and Simulating Unintended Positional Drift during Repetitive Steering Navigation Tasks in Virtual Reality. IEEE Transactions on Visualization & Computer Graphics
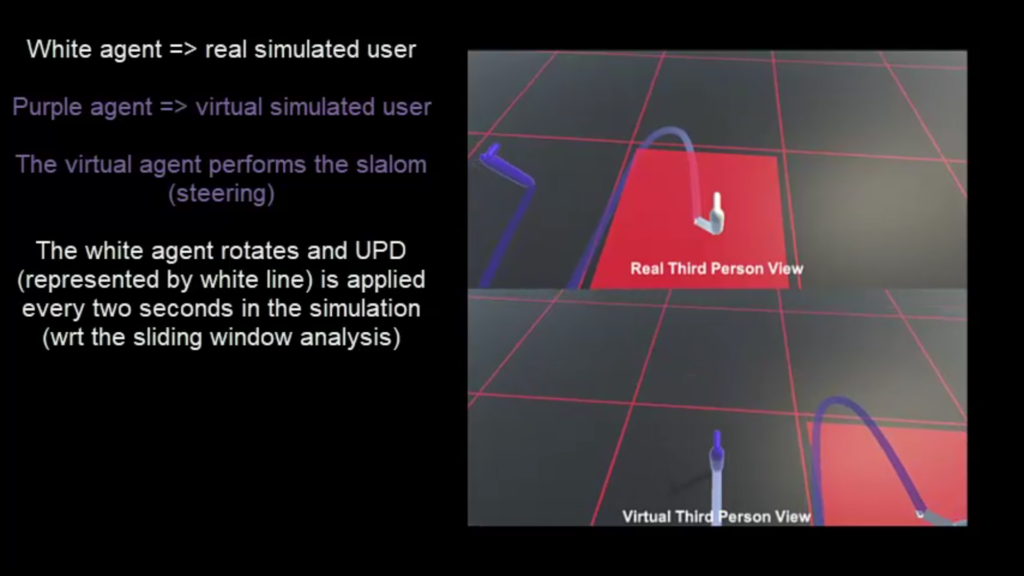
Virtual steering techniques enable users to navigate in larger Virtual Environments (VEs) than the physical workspace available. Even though these techniques do not require physical movement of the users (e.g. using a joystick and the head orientation to steer towards a virtual direction), recent work observed that users might unintentionally move in the physical workspace while navigating, resulting in Unintended Positional Drift (UPD). This phenomenon can be a safety issue since users may unintentionally reach the physical boundaries of the workspace while using a steering technique. In this context, as a necessary first step to improve the design of navigation techniques minimizing the UPD, this work aims at analyzing and modeling the UPD during a virtual navigation task. In particular, we characterize and analyze the UPD for a dataset containing the positions and orientations of eighteen users performing a virtual slalom task using virtual steering techniques. Participants wore a head-mounted display and had to follow three different sinusoidal-like trajectories (with low, medium and high curvature) using a torso-steering navigation technique. We analyzed the performed motions and proposed two UPD models: the first based on a linear regression analysis and the second based on a Gaussian Mixture Model (GMM) analysis. Then, we assessed both models through a simulation-based evaluation where we reproduced the same navigation task using virtual agents. Our results indicate the feasibility of using simulation-based evaluations to study UPD. The work concludes with a discussion of potential applications of the results in order to gain a better understanding of UPD during steering and therefore improve the design of navigation techniques by compensating for UPD.
This work was done in collaboration with the Synthetic Real Lab (University of Central Florida, Orlando, USA).
- DOI: 10.1109/TVCG.2021.3106504 [PDF]
Does the Control Law Matter? Characterization and Evaluation of Control Laws for Virtual Steering Navigation
Brument, H., Olivier, A. H., Marchal, M., & Argelaguet, F. (2020). Does the Control Law Matter? Characterization and Evaluation of Control Laws for Virtual Steering Navigation. In International Conference on Artificial Reality and Telexistence & Eurographics Symposium on Virtual Environments (ICAT-EGVE)
This work aims to investigate the influence of the control law in virtual steering techniques, and in particular the speed update, on users’ behaviour while navigating in virtual environments. To this end, we first propose to characterize existing control laws. Then, we designed a user study to evaluate the impact of the control law on users’ behaviour and performance in a navigation task. Participants had to perform a virtual slalom while wearing a head-mounted display. They were following three different sinusoidal-like trajectory (with low, medium and high curvature) using a torso-steering navigation technique with three different control laws (constant, linear and adaptive). The adaptive control law, based on the biomechanics of human walking, takes into account the relation between speed and curvature. We propose a spatial and temporal analysis of the trajectories performed both in the virtual and the real environment. The results show that users’ trajectories and behaviors were significantly affected by the shape of the trajectory but also by the control law. In particular, users’ angular velocity was higher with constant and linear laws compared to the adaptive law. In addition, constant and linear laws generated a higher variability in linear speed, angular velocity and accelerations profiles compared to the adaptive law. The analysis of subjective feedback suggests that these differences might result in a lower perceived physical demand and effort for the adaptive control law. This work concludes discussing the potential applications of such results to improve the design and evaluation of navigation control laws.
- DOI: 10.2312/egve.20201267 [PDF]
Influence of Dynamic Field of View Restrictions on Rotation Gain Perception in Virtual Environments
Brument, H., Marchal, M., Olivier, A. H., & Argelaguet, F. (2020, November). Influence of Dynamic Field of View Restrictions on Rotation Gain Perception in Virtual Environments. In International Conference on Virtual Reality and Augmented Reality (EUROVR20). Springer, Cham.

The perception of rotation gain, defined as a modification of the virtual rotation with respect to the real rotation, has been widely studied to determine detection thresholds and widely applied to redirected navigation techniques. In contrast, Field of View (FoV) restrictions have been explored in virtual reality as a mitigation strategy for motion sickness, although they can alter user’s perception and navigation performance in virtual environments. This work explores whether the use of dynamic FoV manipulations, referred also as vignetting, could alter the perception of rotation gains during virtual rotations in virtual environments (VEs). We conducted a study to estimate and compare perceptual thresholds of rotation gains while varying the vignetting type (no vignetting, horizontal and global vignetting) and the vignetting effect (luminance or blur). 24 Participants performed 60 or 90 degrees virtual rotations in a virtual forest, with different rotation gains applied. Participants had to choose whether or not the virtual rotation was greater than the physical one. Results showed that the point of subjective equality was different across the vignetting types, but not across the vignetting effect or the turns. Subjective questionnaires indicated that vignetting seems less comfortable than the baseline condition to perform the task. We discuss the applications of such results to improve the design of vignetting for redirection techniques as well as the understanding of perception of rotation gains.
- DOI: 10.1007/978-3-030-62655-6_2 [PDF]
Study of Gaze and Body Segments Temporal Reorientation Behaviour in VR
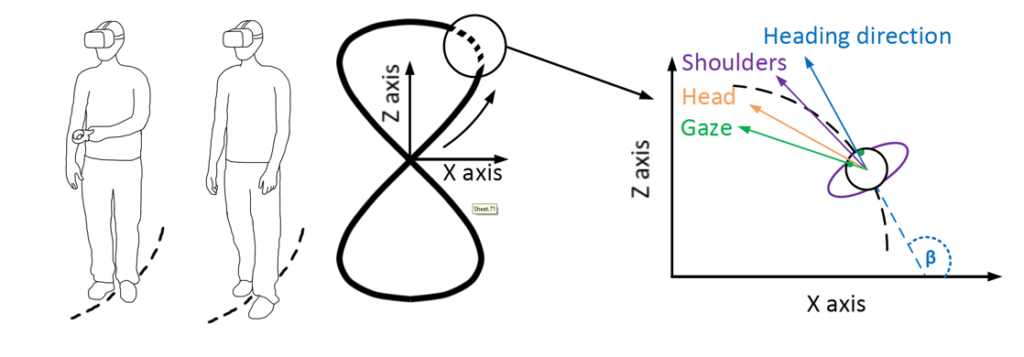
Brument, H., Podkosova, I., Kaufmann, H., Olivier, A. H., & Argelaguet, F. (2019, March). Virtual vs. physical navigation in vr: Study of gaze and body segments temporal reorientation behaviour. In 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR)
This work investigates whether the body anticipation synergies in real environments (REs) are preserved during navigation in virtual environments (VEs). Experimental studies related to the control of human locomotion in REs during curved trajectories report a top-down body segments reorientation strategy, with the reorientation of the gaze anticipating the reorientation of the head, the shoulders, and finally the global body motion [12]. This anticipation behavior provides a stable reference frame to the walker to control and reorient his/her body segments according to the future walking direction. To assess body anticipation during navigation in VEs, we conducted an experiment where participants, wearing a head-mounted display, performed a lemniscate trajectory in a virtual environment (VE) using five different navigation techniques, including walking, virtual steering (head, hand, or torso steering) and passive navigation. For the purpose of this experiment, we designed a new control law based on the power-law relation between speed and curvature during human walking. Taken together, our results showed a similar ordered top-down sequence of reorientation of the gaze, head, and shoulders during curved trajectories for all the evaluated techniques. However, the anticipation mechanism was significantly higher for the walking condition compared to the others. Finally, the results work pave the way to a better understanding of the underlying mechanisms of human navigation in VEs and to the design of navigation techniques more adapted to humans.
This work was done in collaboration with the Interactive Media Systems Group (TU Wien, Vienna, Austria).
- DOI: 10.1109/VR.2019.8797721 [PDF]